



Simplifying Communication
Robots are becoming part of our everyday lives, especially in the industrial space. Leading automation component manufacturers are focused on developing interfaces that harmonize with current and future robotics technologies. At KEB, we’ve developed automation components for robotic systems with communication drivers that allow KEB C6 control products to easily communicate with robots and other intelligent industrial machines.
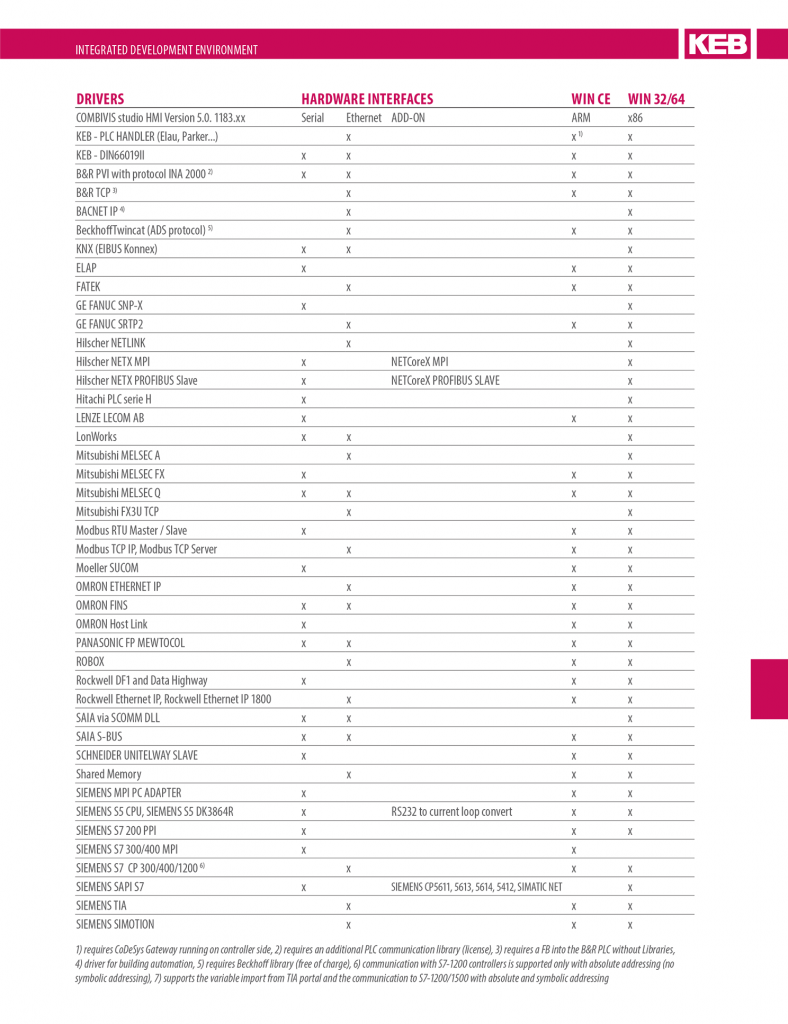
This is a living list and new protocols are added as they are developed. These libraries are all included with KEB’s programming software. Furthermore, KEB has collaborated with KUKA Robotics using their function module library “mxAutomation.” This library is based on PLC open standards and allows programming, diagnosis, or manual running of the KUKA robot via fieldbus modules of KEB’s C6 HMI-LC. The library allows the HMI-LC to send commands while the motion control of the axes is handled by the robot itself. The user can then view information such as the current position of the robot on the HMI-LC. KEB also supports drivers for GE-Fanuc legacy robots. This aids seamless integration with existing robots when adding new or replacing old control systems.
Add-Ons for Robot Functionality
Robotic arms are well-designed pieces of machinery, but there are certain situations where the functional part of the robot needs to be added to the arm to allow it to perform its required task. Spindles are often added to give the operator full control over a tool.
During the design and programming phase, the robot’s controller’s capacity of handling the motion of the arm and the I/O can quickly reach its limits. When this is the case, adding a spindle axis to the robotic arm controller is an option, but in other cases, it is best to leave this to a separate dedicated control system. A KEB spindle control system consists of a C6 Smart PLC, EtherCAT I/O, and an F6 EtherCAT VFD.
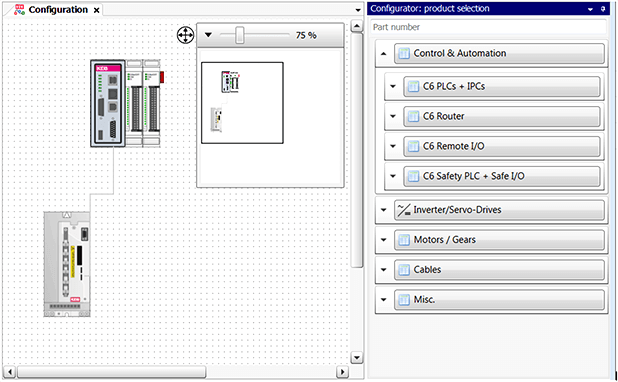
This system comes at a much smaller investment compared to similar performance systems and, as mentioned earlier, the programming software is included in all of KEB’s libraries without additional charge.
When you are commissioning one part or control system in a very large group, having a startup technician on site can lead to a lot of downtime and unnecessary traveling costs. KEB’s C6 Router allows you to log into a control system (or individual VFD) to view and change the program. It creates a remote VPN connection that gives you the same control that you would have if you were hardwired into the machine via PC.
Safety for Robotic Systems
A workplace is a place for innovation and teamwork. When it comes to teamwork with robots, KEB’s main concern is safety. While robots are increasingly interacting with users, a robotics machine designer needs to ensure that this teamwork is safe. A KEB safety system uses Safety Over EtherCAT (FSoE) to accomplish this.
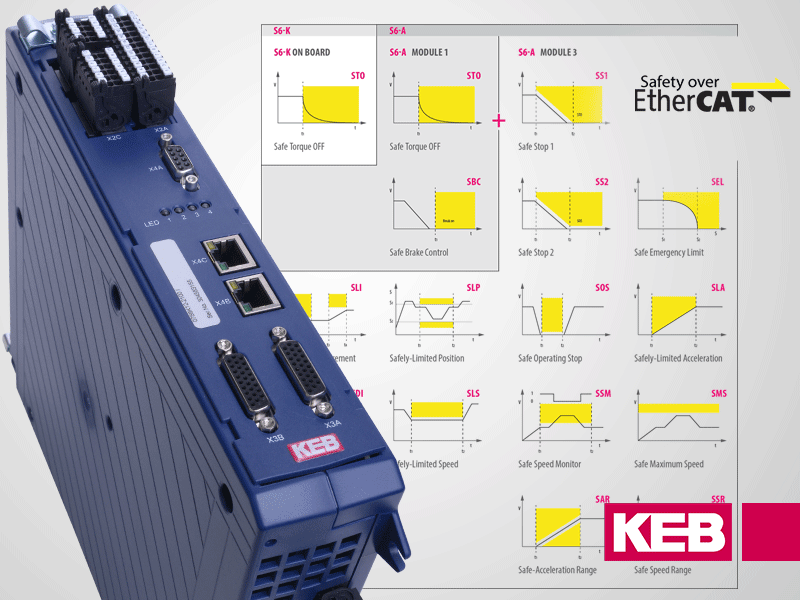
In the KEB system, a safety module within the VFD performs the safe motion functions such as Safe Limited Speed, Safe Limited Position, and Safe Direction and receives commands and STO inputs over the EtherCAT bus from the safety PLC. The safe motion feature within the safety modules in the VFD takes the load off of the safety PLC and allows it to process other signals coming from the safety I/O.
Integrated Axes
There is a lot to consider when designing a robotic system. Generally, when we think about robotics, we think of movement. Sometimes what is overlooked are the static pieces of the assembly. You will need to mount the robot on a fixture that works with system design and is strong enough to hold everything. A robotic frame will typically be sourced from a company such as Vention. One of Vention’s possible modules includes a KEB P1 Brake assembly. Their design team was able to design a housing that contains a KEB permanent magnet brake which is mounted between a motor and the load. This brake module will allow the motor and load to spin freely when it is powered on, hold it or slow it down and bring it to a stop when powered off.
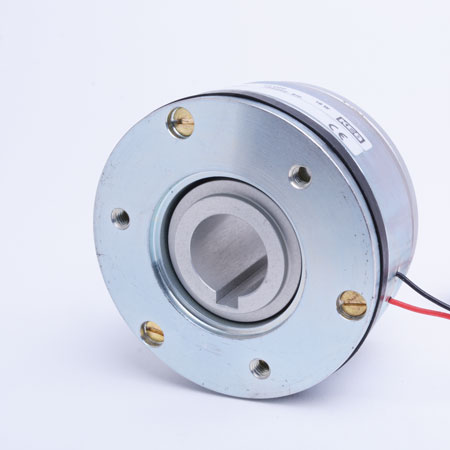
Another way KEB’s permanent magnet brakes are used in robotics is integrated into a joint. The P1s are a great choice when a strong, compact, quality holding brake is needed. Its design does not have any toothed or fingered connections to prevent backlash when closed or residual torque when opened. Whether you are a robot manufacturer, user or integrator contact us to find out how KEB automation components for robotic systems can seamlessly integrate with your application!
Related Articles


Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.