


When supplying a motor power straight from the utility, the user is limited to the line speed of the motor, uncontrolled torque during acceleration, and uncontrolled deceleration (coasting to a stop). Along with these limitations, the motor itself will experience a very high current spike – typically six times the rated current – during startup which causes unnecessary heating and will damage the motor windings over time. An effective, low-cost way to control a motor is using an open-loop variable frequency drive (VFD) with V/Hz control. This allows the user to select a variable speed or speeds and makes for a much smoother startup.
What is Volts/Hertz Control?
Volts/Hertz control stems from the voltage-frequency relationship and how it relates to magnetic flux in Faraday’s Law1.
Where V is the EMF-induced in a coil, N is the number of turns, and φ is the magnetic flux. It can be shown that:
Where K is a constant and f is the frequency of the supply. If the ratio V/f is constant, the magnetic flux will also be constant. In other words, the voltage-frequency relationship will need to be linear if a constant flux is desired. Furthermore, if flux is constant, so is an induction motor’s torque for a given stator current. Therefore, constant volts-hertz control has a constant torque characteristic which is attractive for many industrial applications.
Advantages of V/Hz Control
A line-fed motor will be exposed to large voltage and current spikes upon startup limited to its line speed and will have uncontrolled torque values when spinning up to speed. Adding open-loop V/Hz control VFD addresses these issues yet keeps the control system simple.
One big advantage to V/Hz control is the ability to control multiple motors with one VFD. This gives you the benefit of VFD-controlled starts and operations for a fraction of the cost. Each motor will run at the same speed making this setup ideal for pump and fan applications. The KEB F5 VFD takes this one step further with its set switching ability.
The F5 has eight sets which can all be programmed for a different move or speed. If you add a motor contactor you can run one motor, then when an input is triggered switch over to another set and motor, and have it do a completely different operation. This saves the user the cost of adding a VFD to each motor and still allows for each motor to operate differently.
Disadvantages
There are some disadvantages of V/Hz control. Firstly, the speed regulation is about 3% of the maximum frequency. This means for a given speed, there will be a window of roughly 50 rpm on a 1750 rpm rated motor. A 50 rpm window is unacceptable for some applications so V/Hz control is not a universal solution. Also, the speed response is slower in V/Hz operation than on closed-loop systems because there is no feedback. Changes in load and speed behavior are less easily detected by the VFD and therefore it will react slower than if there was encoder feedback.
Possible VFD Adjustments
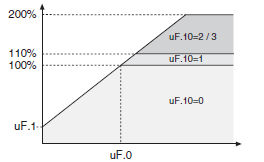
The V/Hz operating line is ideally linear and intersects at (0,0) and (rated frequency, rated speed). At low speeds, the voltage drop caused by the stator resistance is significant. This drop has a direct effect on the motor flux or torque.
There are a few adjustments you can make to fine-tune your V/Hz operation. The first is called “boost.” Boost adjusts the output voltage at 0Hz and gives the motor a little voltage boost at lower speeds to compensate for the stator resistance losses. In the KEB F5 VFD, rated frequency is parameter uF.0 and boost is uF.1 which can be adjusted up to 25% of the rated voltage.
If there is a large breakaway torque in a system, the KEB F5 has a delta-boost function that further adds to the boost for a set amount of time. This is shown by parameters uF.4 (boost) and uF.5 (delta) below.
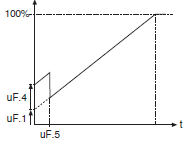
Implementing the delta-boost function can give you the extra boost to help overcome large breakaway torques during startup. After a set amount of time, this function will drop out and normal V/Hz operation will take over.
Field Weakening Operation – What Happens?
Another area that is opened up when operating in V/Hz mode is the field weakening range. This is the area above the motor’s rated speed which is achieved by supplying the motor more than its rated frequency at its rated voltage. A VFD can only supply the line voltage, which no longer follows the ideal V/Hz linear curve.
Based on Faraday’s law, the motor’s flux diminishes as the frequency increases but the voltage is held constant. The motor no longer operates in a constant torque mode but operates in a constant power mode. You need to limit this current to protect the motor and VFD. Limiting the current and voltage but increasing the frequency in the field weakening range will decrease the flux or torque as we saw in the flux equation discussed earlier.
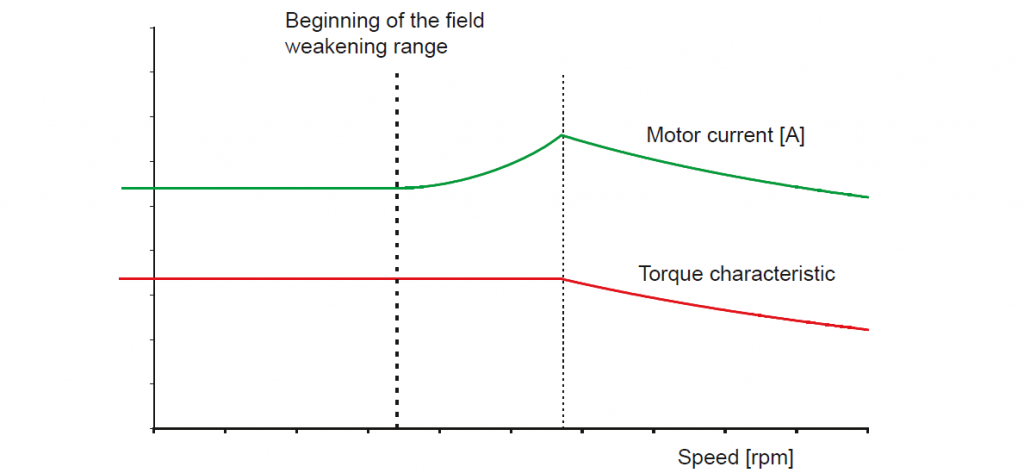
When operating in the field weakening range, it is important to remember the motor’s torque output will diminish and eventually be reduced below the load’s required torque, effectively stalling the motor.
Summary
Volts/Hertz control is a simple, low-cost way of getting better performance and control out of your motors. You are able to control multiple motors in V/Hz mode with a single VFD. It is used a lot in pump and fan applications due to its lack of needing very precise speed control. Operating in V/Hz mode opens doors that are not available by connecting a motor to line power. Firstly, you are able to vary the speed of the motor with constant torque up to the rated speed of the motor. If desired, you can over-speed the motor into its field weakening range by sacrificing a little torque.
If V/Hz operation sounds like the right choice for your application, contact a KEB Engineer today for help selecting the right VFD for the job.
References
1. Georgia State University Hyperphysics. Faraday’s Law http://hyperphysics.phy-astr.gsu.edu/hbase/electric/farlaw.html Publication date unavailable. Accessed 1/29/2018
2. Reference Manual. KEB 2014; Rev 1B
Related Articles
Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.