
T6 Auxiliary Inverter Case Study – Electric School Bus

In a previous post, I provided an overview of electrifying auxiliaries with VFDs. Here, I will provide a practical example of applying an electric school bus and dive deeper into some of the benefits.
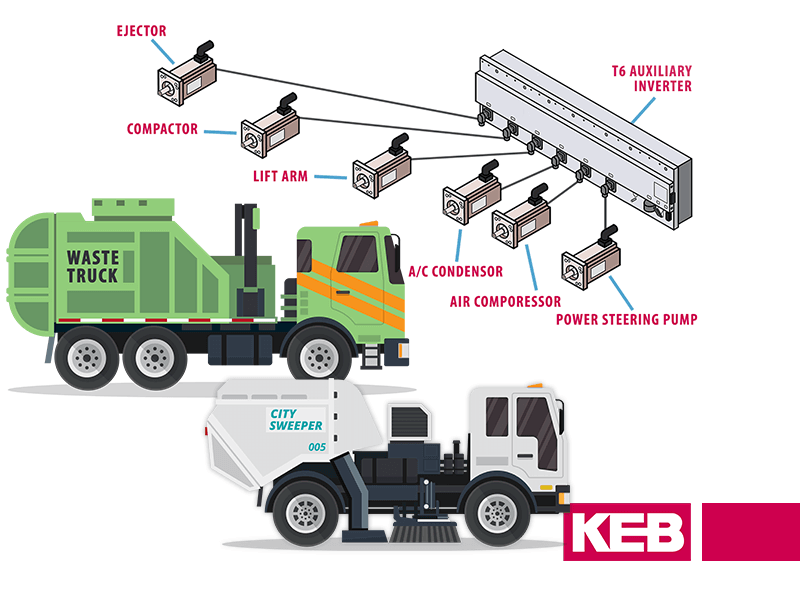
Coming back to the concept that zero-emission, all-electric vehicles will not have a constantly running engine to provide power to the auxiliaries. This begs the simple question of what would typically need to be motorized and electrified in these applications and how a variable frequency drive (VFD) solution can provide further benefit.
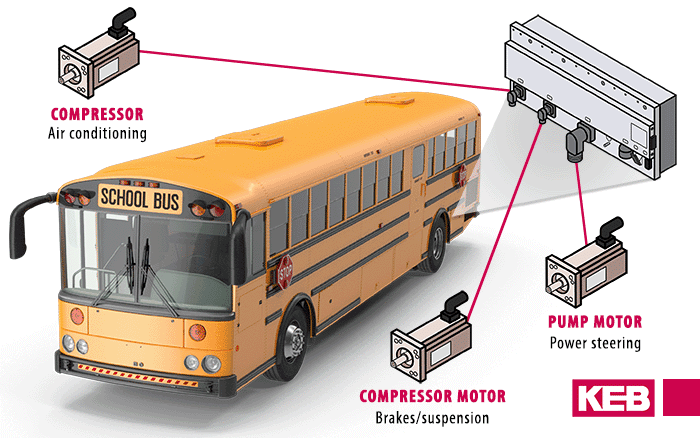
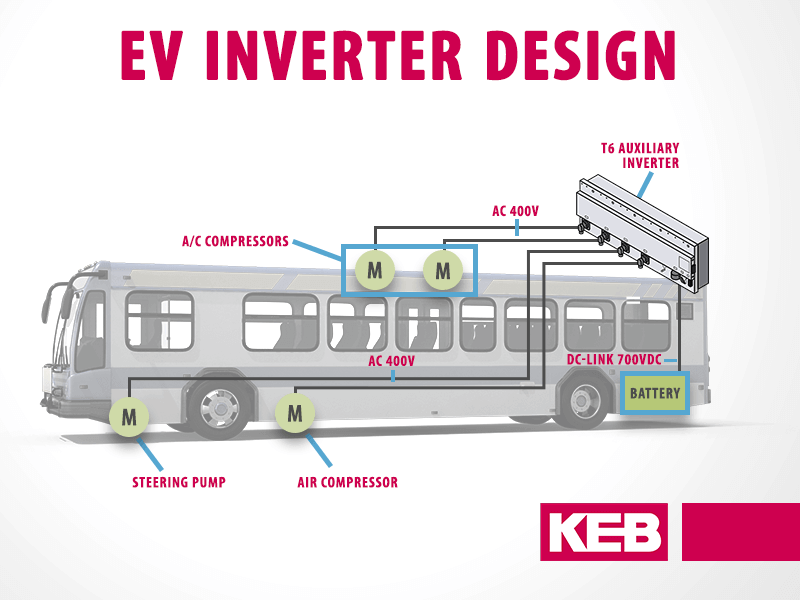
In our example of an electric bus, the following auxiliaries would be common candidates for electrification along with approximate motor powers:
- Pump motor for power steering (5.8kW)
- Compressor motor for air brakes and/or suspension (5.7kW)
- Compressor motor for air conditioning unit (9.4kW / 15.2kW max.)
With the electrification of these auxiliaries in mind, VFD solutions provide the benefits of reduced power consumption, more efficient motor operation, smaller designs using sensorless (encoderless) closed-loop motor control, and space-saving mechanical design packages.
This post goes into more detail about each of these 4 benefits.
Energy Efficiency
One option for electrifying these auxiliaries would be to turn these motors on and off as needed with contactors. But, this is not energy efficient as the motor would draw at least nominal power when on, regardless of the auxiliary motor’s loading conditions. Additionally, it could be difficult to measure power consumption and manage or balance loads between auxiliaries.
A second option for electrification would be to use a VFD to provide on-demand power. This option can provide energy efficiency in two ways.
Variable speed control can be used to regulate the speed of the motors, and thus power consumption, based on actual motor demand.
The second way to increase efficiency is to use KEB’s sensorless closed-loop (SCL) which utilizes a motor model of measured characteristics to operate the motors more efficiently. This reduces power consumption which conserves battery power. Additionally, SCL provides tighter regulation and responsiveness of motor speed and torque control, limiting peak power demands due to abrupt load changes (for example, demand on power steering from hitting a curb).
Since SCL already measures the motor current and voltage for its motor control algorithm, this data can also be used to regulate and/or prioritize loads to balance and manage power consumption between auxiliaries much more easily. For example, the power steering could be given priority over the air conditioning, and during a series of turns where the power steering may require additional power, the air conditioning power can be lowered.
Another benefit of active current measurement and the ability to regulate is that it can also provide overload and overcurrent protection to the motor and limit the input current to protect the inverter.
Sensorless Closed Loop Motor Control
Although the energy efficiency aspect of SCL has already been discussed, application examples provide further detail to support the benefit of efficient motor operation.
Motor size can be reduced due to efficient operation with SCL. Since SCL utilizes measured motor characteristics in motor model algorithms (as opposed to open loop vector, where nameplate motor data is entered into a generic model), the motors are operated more efficiently and with less heating and motor losses.
As an example, motor manufacturer Moteg was able to shrink a steering pump design by over 8 ¾” (223 mm) in length and reduce the weight from 46kg to 8kg. Additionally, since SCL allows encoderless operation, the motor design was also changed from an asynchronous induction motor to a more efficient PM servo motor.
A second example is a test that was done to compare the performance of hydraulic steering pumps utilizing an asynchronous induction motor in sensorless closed loop versus open loop V/Hz operation. During nominal operation (driving straight), the motor drew significantly less current (4A) compared to the open-loop operation current draw (9A).
Peak current reduction during abrupt load can be mitigated with SCL. Since the motor characteristics are learned and the motor current and voltage are actively measured as part of the motor model control loop, this allows for precise and responsive speed and torque control. The result is that current spikes due to abrupt load changes are minimized. In an extension of the previous steering pump example, under an abrupt loading condition such as hitting a curb, the unit operating in SCL drew a significantly less current (10A) compared to the open-loop operation which drew in excess of 20A and resulted in an overcurrent fault.
In summary, SCL can significantly reduce motor current during nominal operation and drastically reduce peaks during abrupt loads
Space-Saving Mechanical Design
A VFD, depending on its design, can also provide benefits to the mechanical layout of electrical components in-vehicle systems in terms of size, component reduction, and placement.
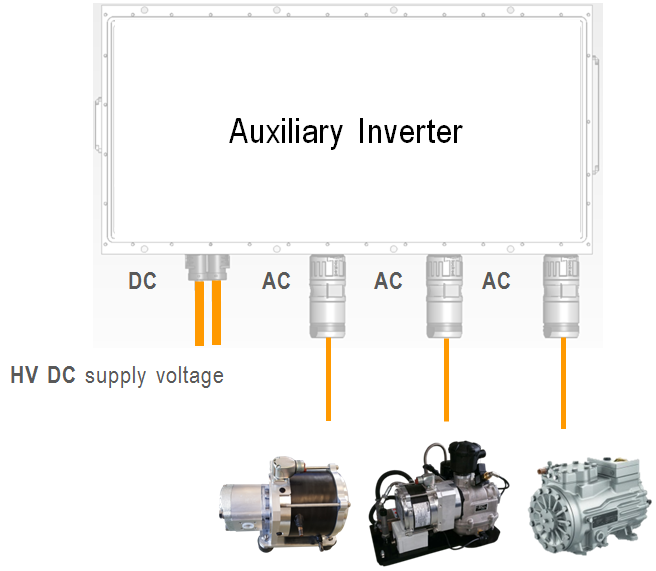
Multi-axis designs can reduce space and wiring requirements. In the electric school bus example, three auxiliaries were identified as being candidates for electrification. Although these are three independent systems of different sizes, a multi-axis VFD can be scaled to support the desired number of auxiliaries and modular power stages, allowing electrified auxiliaries to be powered from a single VFD system.
This type of solution consolidates parallel VFDs to reduce redundant components which simplifies wiring and eliminates expensive cabling (e.g. DC bus cables) as well as significantly reduces the size of the unit to save space. Returning to our example, such a system would consist of these motors 1x 15kW (Air Conditioning) + 1x 7.5kW (Air Compressor) + 1x 7.5kW (Power Steering).
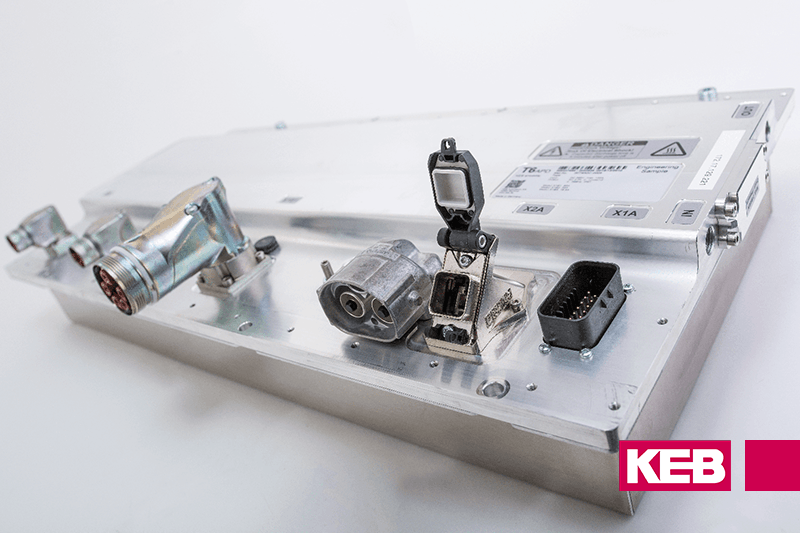
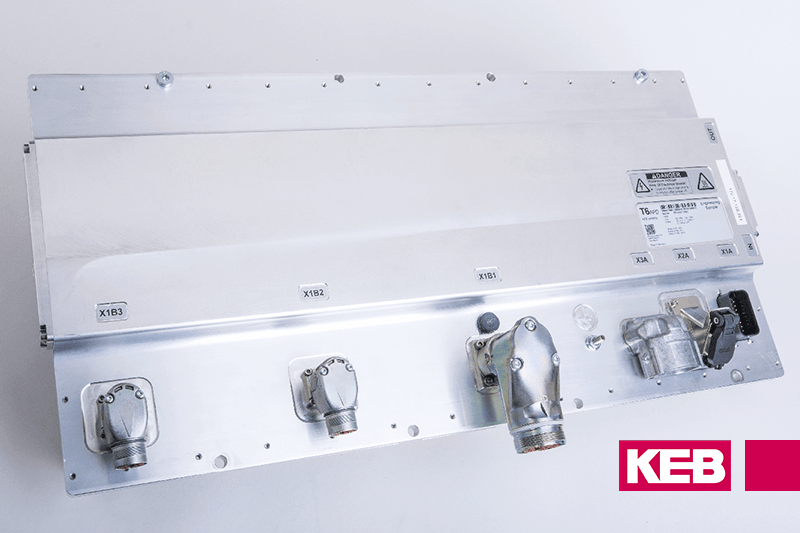
Waterproof designs can be mounted externally to the vehicle chassis to reduce internal space requirements. Inverters like the T6, rated for IP6k9k / 67, have water protection, including temporary immersion. If this protection includes the high voltage DC supply connection, AC motor connections, and control logic interface then it is possible the unit can be mounted externally, although the second consideration in this regard is whether the unit is designed with internal components rated for the external environment temperature range.
VFDs for speed control, energy efficiency, and precision motor control have long been established in industrial applications as the go-to performance solution. In the electrification of commercial vehicles, the propulsion motor is the natural candidate for VFDs solutions. But optimized control of the auxiliaries via VFDs may be overlooked and as a candidate for vehicle power consumption efficiencies. In addition, VFD mechanical packages can offer space and system cost optimization through consolidated designs and mounting options.
Learn More about KEB’s T6 VFD
For more information on the T6 VFD for electrifying auxiliaries, visit the product page or contact us using the form below.
About Tony Heiser
Tony Heiser is the Business Development Manager at KEB America, Inc. for the T6 Transportation Inverter. Tony has 12+ years of experience with AC motor controls and VFD applications with KEB. He received his Bachelor of Electrical Engineering from the University of Minnesota, Minneapolis-St. Paul. For more information on the T6 VFD for electrifying auxiliaries, visit the product page or contact us at sales@kebamerica.com.
Related Articles
Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.