
KEB’s EtherCAT drives are ideal for machine builders who serve the global market. The drives feature control loops with a 62μSec update rate. This allows precise motor control for motion control applications. Motor types include induction motors, AC servo motors, synchronous reluctance motors, and linear motors.
Technology
EtherCAT Drives


Real-time Performance
Next-generation KEB drives feature control loops with a 62-microsecond update rate. This allows extremely precise motor control for motion control applications.
The drives also have a dual-channel, multi-format encoder interface. This allows KEB drives to run a wide variety of different motor types including induction motors, AC servo motors, synchronous reluctance motors, and linear motors.

Scalable - All Voltage Classes
KEB’s EtherCAT drives are ideal for machine builders who serve the global market.
BLDC and Stepper motors can be run with KEB’s EtherCAT Stepper Module.
KEB offers dedicated 200-230Vac and 400-480Vac drives that are scalable to large powers. Additionally, single-phase inputs are available.

Safety over EtherCAT (FSoE)
All 6th generation drives from KEB offer Safety over EtherCAT (FSoE) as an optional feature.
FSoE allows Safe Drive functions – like Safe Torque Off and Safe Limited Speed – to be handled over the SIL3 rated bus protocol.
Safety over EtherCAT reduces the amount of discrete wiring going in and out of the cabinet. This simplifies wiring, shortens installation times, and increases troubleshooting capabilities.

EtherCAT Servo Drive
Dynamic AC servo applications are best handled with the COMBIVERT S6 EtherCAT servo drive. The S6 offers an integrated 24VDC braking control and dual-channel encoder interface.
The drive features a 250% current overload for dynamic motion profiles. The S6 is capable of up to 16kHz switching frequency for noise-critical theatre applications and the operation of high-speed spindle motors.
The KEB S6 has a number of different integrated functional safety options including Safe-Torque-Off and Failsafe-over-EtherCAT (FSoE).


COMBIVERT H6 Multi-axis Drive
The COMBIVERT H6 is a shared DC bus drive that offers scalable drive modules. The H6 series includes an AFE module that allows it to line regen. This makes the H6 popular for multi-axis regenerative applications like Winders, Hoists, and renewable energy.
The H6 offers dual output modules that can run 2 independent motors for increased compactness and density. All modules communicate with EtherCAT and motors are controlled with DS402 profiles.
Air-cooled and Liquid-cooled heatsinks are available. The compact size with high overloads makes it ideal for difficult applications like Injection Molding machines.


Large Power EtherCAT VFDs
The KEB COMBIVERT F6-K EtherCAT VFD is the best choice for high-performance machines requiring large power drives like extruders, machine tools, or test stands.
The units can be offered in a variety of different heatsinks (air-cooled, liquid-cooled) and carry through 900kW.

Open Loop EtherCAT VFDs
Open Loop EtherCAT VFDs can be used to connect a basic motor axis to the EtherCAT master.
Basic VFD control can be achieved cost-effectively with the KEB COMBIVERT G6 Open Loop VFD.
This drive platform is offered up to 40hp and in both 208-230V and 480V classes. It has single-phase input options and includes Safe-Torque-Off (STO).


Why Choose EtherCAT Drives?
EtherCAT is an industrial ethernet fieldbus system managed by the EtherCAT Technology Group (ETG) and has been growing rapidly in acceptance and installed nodes. From a compatibility standpoint, KEB and EtherCAT are a perfect match.
First, EtherCAT offers excellent real-time performance. KEB drives rise to the top in difficult applications like spinning a high-speed motor 40,000 RPM or synchronizing multiple servo axes on a printing press.
Second, EtherCAT is an open technology with many vendors and user members. KEB has always adopted open automation technology and does not push closed proprietary protocols.
Finally, EtherCAT offers great value (performance vs. cost). KEB has a wide range of drive platforms that can be optimally selected for a particular application.

What is the difference between VFD and Servo Drive?
A variable-frequency drive (VFD) is a unique type of motor controller. VFDs control a motor’s torque and speed by adjusting its input electricity. When an application requires the motor to run faster or slower, the VFD can ramp up or down accordingly.
VFDs are a great choice for applications with varying torque loads. They’re a tool that can help you expend less energy vs. running a motor at full bore at all times. VFDs also limit wear and tear on the motor over time. Common applications include controlling compressors, pumps, fans, and belts.
A servo drive is a device that provides the required voltage to a servo motor. They’re also commonly known as amplifiers. Servo drives use command signals and servo feedback to calculate exactly how much power the motor needs. This allows for automated control of motor positioning, torque, and velocity.
Servo drives are used for applications requiring coordinated motion across axes, including robotic arms, aerospace, and automation technology.
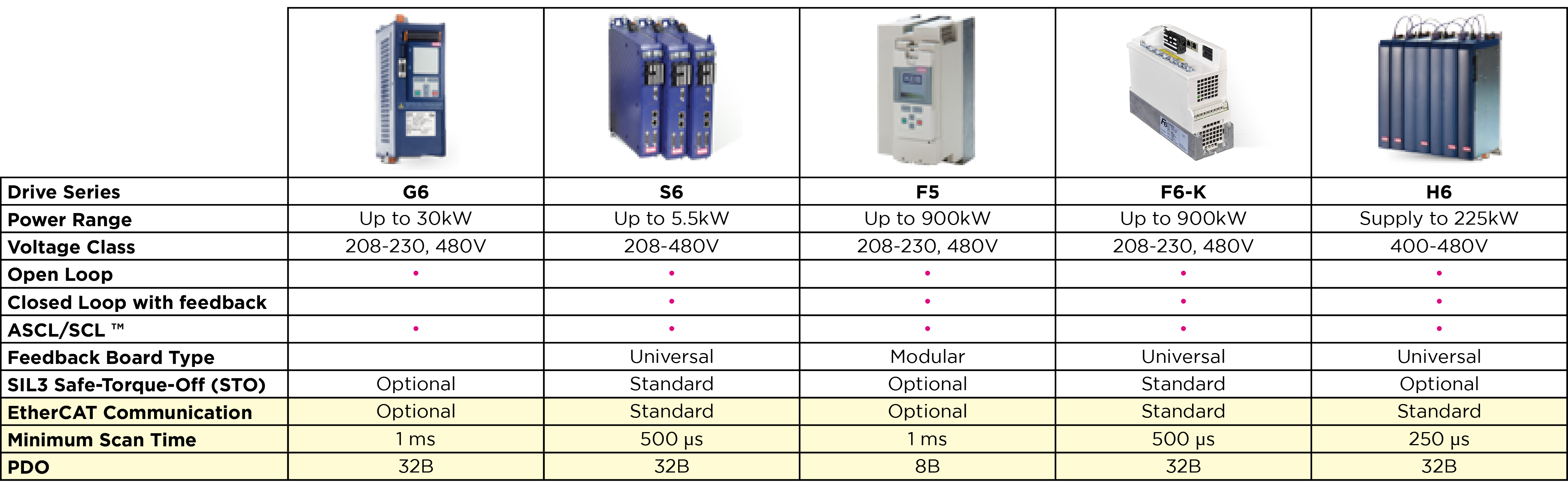
KEB EtherCAT Drive Types
All of KEB’s next-gen drives feature EtherCAT communication front and center. Even beyond drives, KEB’s remote I/O, embedded controllers, and industrial PCs also feature EtherCAT.
KEB has a full-drive product: open loop drives, 208V drives, high power drives, liquid-cooled drives, multi-axis drives, and more.
What Is the Difference Between Ethernet and EtherCAT?
EtherNet/IP™ and EtherCAT are two of the most common industrial protocols used by machine builders. Both are built on the Ethernet physical layer, but use different approaches to send and receive messages from connected devices on the network.
EtherNet/IP™ is an inexpensive, readily available protocol familiar to most IT personnel. It uses the same hardware as typical Ethernet networks, implemented over standard TCP/IP protocol and transmitted via the Ethernet physical layer. The downsides of EtherNet/IP™ include lack of real-time performance and significant jitter, which can negatively impact machines requiring repeatable performance.
EtherCAT protocol is also transmitted over the Ethernet physical layer—but does not use TCP/IP. Instead, it leverages a “processing-on-the-fly” approach, with each EtherCAT telegram containing data for and from each device on the network. This results in extremely fast, efficient data transmission with minimal jitter.
EtherCAT vs. EtherNet/IP™ for Motion Control
While both the EtherNet/IP™ and EtherCAT enable synchronized motion control, the latter is better suited for it. EtherCAT control platforms provide sub 1ms cycle times thanks to their low jitter, efficient handling of telegram information, and dedicated ASIC (application-specific integrated circuit) on each EtherCAT slave.
Both EtherNet/IP™ and EtherCAT protocols (FSoE) offer flexible options for machines in need of functional safety. These features allow safety switches, I/O, and drives to seamlessly communicate safety parameters across the bus.
Is EtherCAT real-time?
EtherCAT protocol offers efficient handling and sub-millisecond update rates, creating a real-time, high-speed network for industrial controls. This advantage makes EtherCAT well suited to machines used in high-performance applications, including pitch systems for wind power automation and hoists for material handling.
Does EtherCAT require special hardware?
An EtherCAT master device does not require any special hardware. You can use any Ethernet-enabled PC as a master device—and any Ethernet MAC (medium access control). EtherCAT also pulls minimal resources, meaning you won’t have to invest in dedicated communication processors.
Implementation of EtherCAT slave devices is more complex. You can find a step-by-step guide for EtherCAT slave implementation on their website.
EtherCAT Protocol Motor Types
EtherCAT is compatible with a range of motors, making it a highly versatile protocol for machine builders doing motion control:
Induction Motors
Induction motors can be used alongside EtherCAT protocol to further improve machine performance and reduce jitter. These motors are ideally suited for high-performance, fixed-speed applications, such as wind turbine generators.
AC Servo Motors
EtherCAT connectivity is built-in for KEB AC synchronous servo motors. Our DL3 servo motors deliver exceptional performance and control for positioning or cycling applications—and can be further customized to fit your unique needs.
Synchronous Reluctance Motors
Synchronous reluctance motors are great solutions for machine builders looking to improve sustainability and use less electricity. These motors can be integrated with EtherCAT and variable-frequency drives (VFDs) to optimize motor speed, torque, and synchronization capabilities.
Linear Motors
EtherCAT protocol is a perfect fit for linear motors, providing the power and flexibility of a real-time network across 3D printing, woodworking, and even metalworking machinery. This system can be used in combination with S6 VFDs to further support your linear motor applications.
KEB Drive technology takes machines to the next level
KEB has a long history of solving automation challenges. Let’s discuss your challenges and goals to see how we can help.