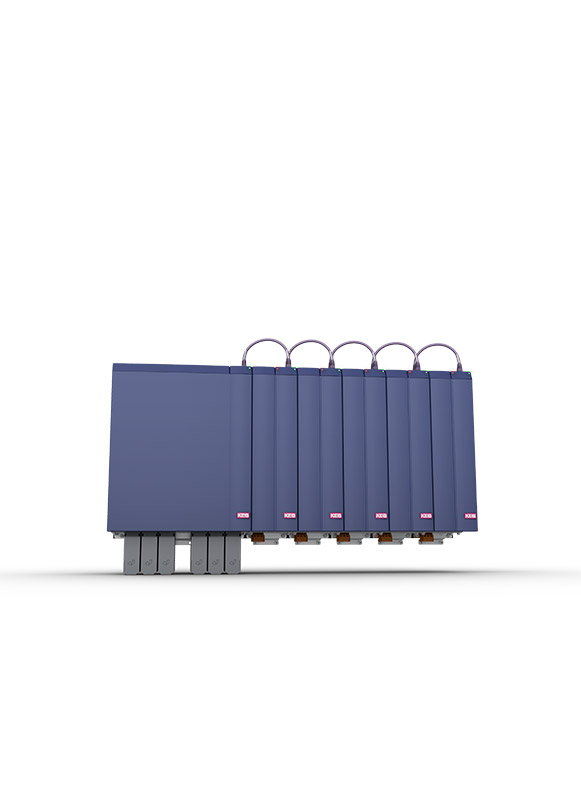
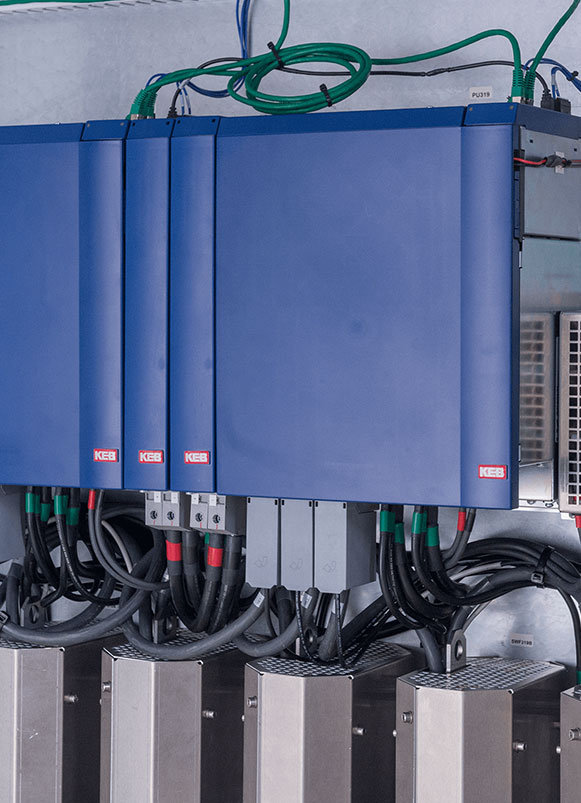

The COMBIVERT H6 is KEB’s multiaxis (shared bus) EtherCAT drive platform. The modular design allows for the addition of power supplies, control units, drive axes, safety options, encoder boards, and communication interfaces.
Product Details
The COMBIVERT EtherCAT H6 platform uses a shared DC bus connection which allows drive modules to be added as needed. Depending on application requirements – different supply and PLC control units can also be selected.
The modules communicate to each other through an EtherCAT bus system. This provides extremely fast and reliable communication while simplifying wiring and reducing installation time. The H6 drive modules are available in single and double-axis outputs. Single-axis modules are available up to 110kW. A modular 6-pulse rectifier supply unit can be supplied to power the drive units through a DC-bus. Alternatively, an Active Front End (AFE) supply unit with filter can be supplied which offers a regulated DC bus and low harmonic performance.
For complete machine control, the H6 control unit can be configured as an EtherCAT master. There are also pluggable fieldbus cards which support Profibus, CAN, Interbus, and Profinet The H6 has optional safety modules. Module 1 includes Safe-Torque-Off (STO) and Safe-Brake-Control (SBC) functionality. Module 2 includes: SS1, SS2, SOS, SLS, SLP, SLI, SDI, SSM.
Tech Specs
Electrical
• Power Range (B6 Supply): Up to 225kW
• Power Range (Drive output): Up to 110kW
• Voltage Class: 400V
• Rated Switching Frequency: 8kHz
• Maximum Switching Frequency: 16kHz with derate
Mechanical
• Cooling Type: Fan or Flat Back (Liquid Cooled)
Certifications
• cULus
• CE
Environment
• Protection Rating: IP20
• Rated Altitude: 1000m with derate up to 2000m
Control
• Encoder Feedback: Yes. Incremental (TTL), Resolver, BiSS, SSI, SinCos, EnDat 2.1/2.2, Hiperface.
• Motor Types: Induction, PM Servo, Torque
• Motor Control: V/Hz, SMM, ASCL, SCL, Closed Loop Vector
• Control Types: Velocity, Torque, Positioning
Options
Supply Unit Three available options:
• B6 bridge rectifier
• Active Front End (AFE)
• 24VDC Control Supply
Fieldbus Communication
• EtherCAT master
• EtherCAT slave
• Interbus
• CAN
• Profibus
• Profinet
Functional Safety
Type 1:
• STO – Safe-Torque-Off
• SBC – Safe-Brake-Control
Type 2:
• SS1 – Safe Stop 1
• SS2 – Safe Stop 2
• SOS – Safe Operating Stop
• SLS – Safely-Limited Speed
• SLP – Safely-Limited Position
• SLI – Safely-Limited Increment
• SDI – Safe Direction
• SSM – Safe Speed Monitoring