
EtherNet/IP vs EtherCAT – Machine Builders Doing Motion Control



One key decision machine builders must make is what industrial protocol to use. Two we often see are EtherNet/IP™ vs EtherCAT. Let’s compare these two protocols for machine builders in synchronized motion control.
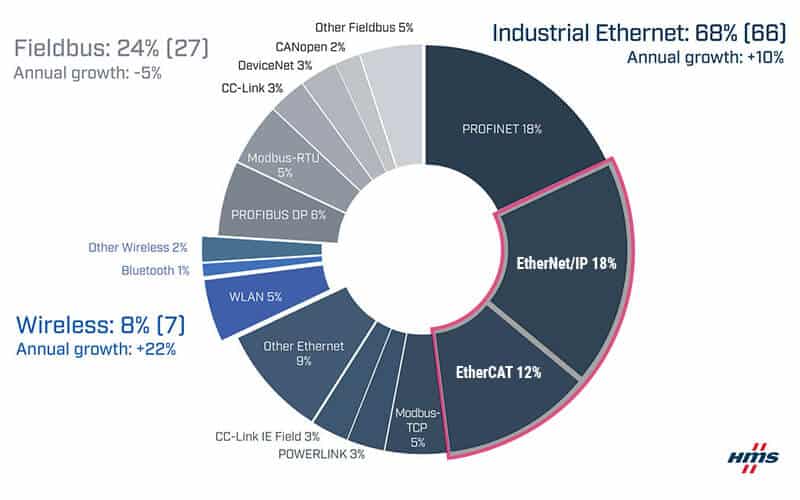
What’s the Difference Between EtherCAT vs. EtherNet/IP?
EtherNet/IP and EtherCAT are two protocols for industrial automation. They move input/output data between controllers and endpoints on machines. The key difference is in how they do this:
EtherCAT moves I/O data over physical Ethernet, processing on the fly with nodes and an EtherCAT master. EtherCAT is fast and flexible, especially paired with KEB embedded IPCs.
EtherNet/IP is transported via Ethernet cabling using TCP/IP. This protocol is based on Ethernet standards, making it accessible to IT teams. High-performance servo drives across standard Ethernet networks support EtherNet/IP.
What is EtherNet/IP? The Basics
EtherNet/IP is ODVA’s execution of Common Industrial Protocol (CIP™) over Ethernet. It’s mainly associated with Rockwell Automation.
EtherNet/IP is an application layer implemented over TCP/IP protocol. It uses the same hardware as office networks. Each EtherNet/IP device can send and receive messages from any other EtherNet/IP device.

Inexpensive CAT5 network cables can connect EtherNet/IP devices. IT departments and engineers will be familiar with its wiring and general operation. Control and standard network traffic coexist on the same cable.
EtherNet/IP can’t provide performance in real time or within a certain time frame. Jitter can be quite large, along with other network traffic affecting machine control. This may negatively impact machines requiring repeatable performance.
EtherCAT – The Basics
Beckhoff started EtherCAT and now EtherCAT Technology Group (ETG) manages It. EtherCAT is also transmitted over the Ethernet physical layer with inexpensive CAT5 cabling.
EtherCAT uses a “processing-on-the-fly” approach, where the EtherCAT master sends out a main telegram. Each node reads its own input data and adds output data to this message. The telegram cycles to all connected nodes and returns to the master.
ASIC chips enable this process on EtherCAT slave devices. The result is fast, efficient data transmission. EtherCAT devices can operate synchronously, bringing jitter down to a few microseconds.
Network Flexibility
EtherNet/IP supports many network topologies. Each device must have an IP address and follow the same subnet as other devices.
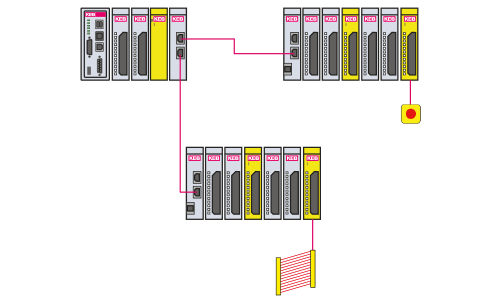
EtherCAT does not use IP addresses. The order of network wiring defines each device, and single-panel machines can daisy-chain from device to device. EtherCAT Extenders support star and tree topologies, and dual EtherCAT ports support ring topologies.
Slave nodes have an embedded termination resistor, with no added network termination required. This simplicity gives EtherCAT the network advantage for basic machines.
Performance: Synchronized Motion Control
Vanilla EtherNet/IP does not handle synchronized motion control tasks well. Because of this, a new profile called CIP Motion™ was developed.
CIP Motion uses a time-based model to perform motion control tasks. It’s often coupled with CIP Sync™ to ensure real-time performance.
EtherCAT supports synchronized motion control right out of the box. Efficient handling of telegram info and the ASIC enables extremely fast update rates.
 KEB’s scalable EtherCAT control platform can provide sub-1ms cycle times
KEB’s scalable EtherCAT control platform can provide sub-1ms cycle times
EtherCAT is known for its low jitter, allowing higher synchronization between axes. EtherCAT component vendors can provide tested jitter info.
Functional Safety (FS)
EtherCAT (FSoE) and EtherNet/IP (CIP Safety) offer networked FS options if your machine needs functional safety. These allow safety I/O, switches, and drives to communicate safety parameters over the bus system.
Both safety protocols are independently certified to a SIL3 level.
Both platforms provide discrete safety wiring and efficient transfer of network info.
Ubiquity of Suppliers
ETG does an incredible job attracting active vendor members. There are currently 500+ vendor member companies offering ETG products.
Part of this success is due to the high performance of EtherCAT itself. Another part is due to ETG’s free memberships and royalty-free installation of EtherCAT.
Having several vendor members gives machine builders more choice in products. EtherCAT customers have many options for controls, drives, I/O, encoders, safety, etc.
The rapidly increasing number of EtherCAT products is a huge advantage for machine builders.

Value – Price to Performance Ratio
A simple value equation has performance on top and price on the bottom. By increasing performance, a product manager will increase value.
Similarly, decreasing cost increases value. Value goes up when performance improves and price decreases.

So, Which is Best?
For motion control applications, EtherCAT is clearly the winner in performance.
It’s designed for low jitter and real-time performance without any special hardware.
Machine builders save money by avoiding expensive managed switches. The wide availability of EtherCAT products also drives down price, reducing costs overall.
EtherCAT offers a distinct advantage for machine builders based on performance and price.
Based on performance and price, EtherCAT offers a distinct advantage for machine builders.
KEB provides EtherCAT controls, IO, Servo Drives, VFDs, HMIs, and Safety products. Contact us for your motion control needs.

Related Articles




Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.