
The Power of Decentralization in Electrified Equipment

The electrification of commercial vehicles and mobile machinery unlocks new system architectures previously unthinkable within traditional ICE-driven platforms. The level of modularity made possible with battery-powered equipment creates new design opportunities for the vehicle and body equipment work functions.
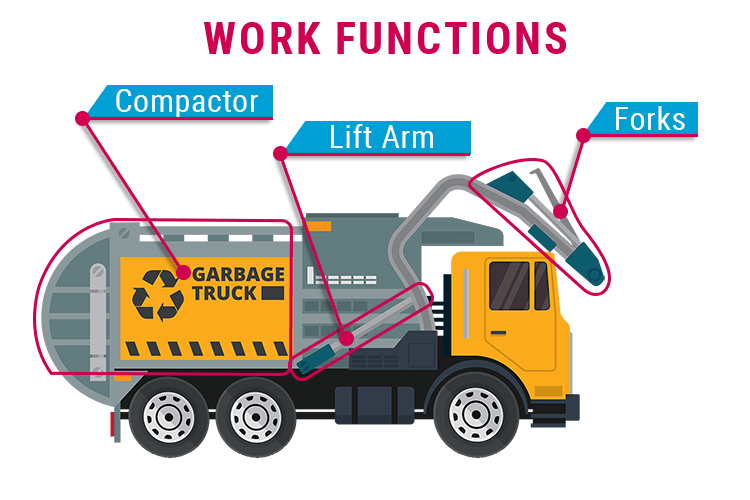
Work functions are the mechanisms designed to perform some type of work task. These can include anything from a refuse truck’s lift arms to a street sweeper‘s brushes. There are several ways to approach the challenge of electrifying these work functions, and choosing the right approach can result in significant gains in efficiency. This article explains how battery-powered machinery presents new opportunities with modular designs and higher efficiency by decentralizing work functions.
The Conventional Approach: Centralized Hydraulics
To understand how decentralization improves mobile equipment design, it’s important to consider the conventional blueprint for work equipment. For conventional equipment, design has revolved around a singular prime mover, the internal combustion engine (ICE). Fueled by energy-dense fossil fuels, these engines have been the traditional choice for equipment requiring sustained operation throughout a workday. However, it is essential to note that ICEs are limited to a single drive shaft. This poses an engineering challenge when multiple work functions are added to a vehicle or mobile machine. A solution is needed to facilitate power distribution and provide independent control of the individual work functions.
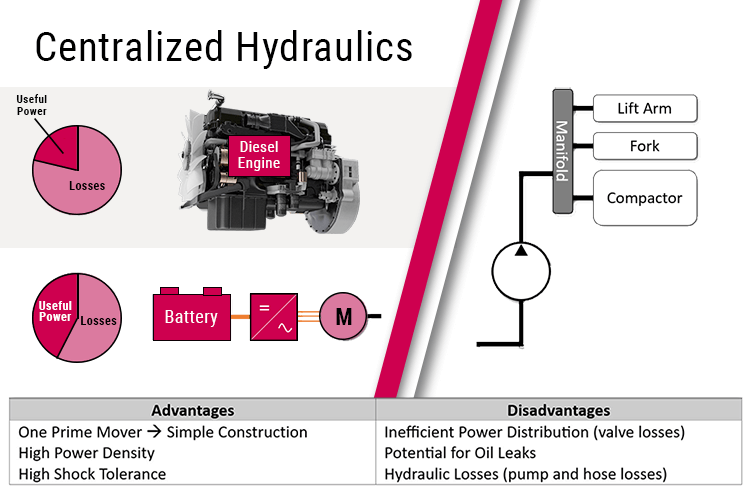
Traditionally, centralized, PTO-driven hydraulic systems have been the most effective solution to this challenge. In this scenario, an engine drives a central hydraulic pump to provide the necessary hydraulic flow and pressure to control all of the work functions. Here, hydraulic systems offer scalability and control using valves and manifolds to facilitate power distribution across multiple work functions with remarkable power density. However, centralized hydraulic systems are marred by significant hydro-mechanical inefficiencies caused by pressure relief and throttle valve losses associated with the distribution of power.
Here, the hydraulic system is sized to simultaneously deliver the worst-case scenario flow and pressure for all work functions. When individual work functions are inactive, the surplus energy is wasted in the form of heat through pressure relief and fluid friction losses. Conventional control systems with a fixed displacement pump and pressure relief valve can have efficiencies as low as 20%; even load sensing and pressure control systems can have significant efficiency losses, depending on the operating point.
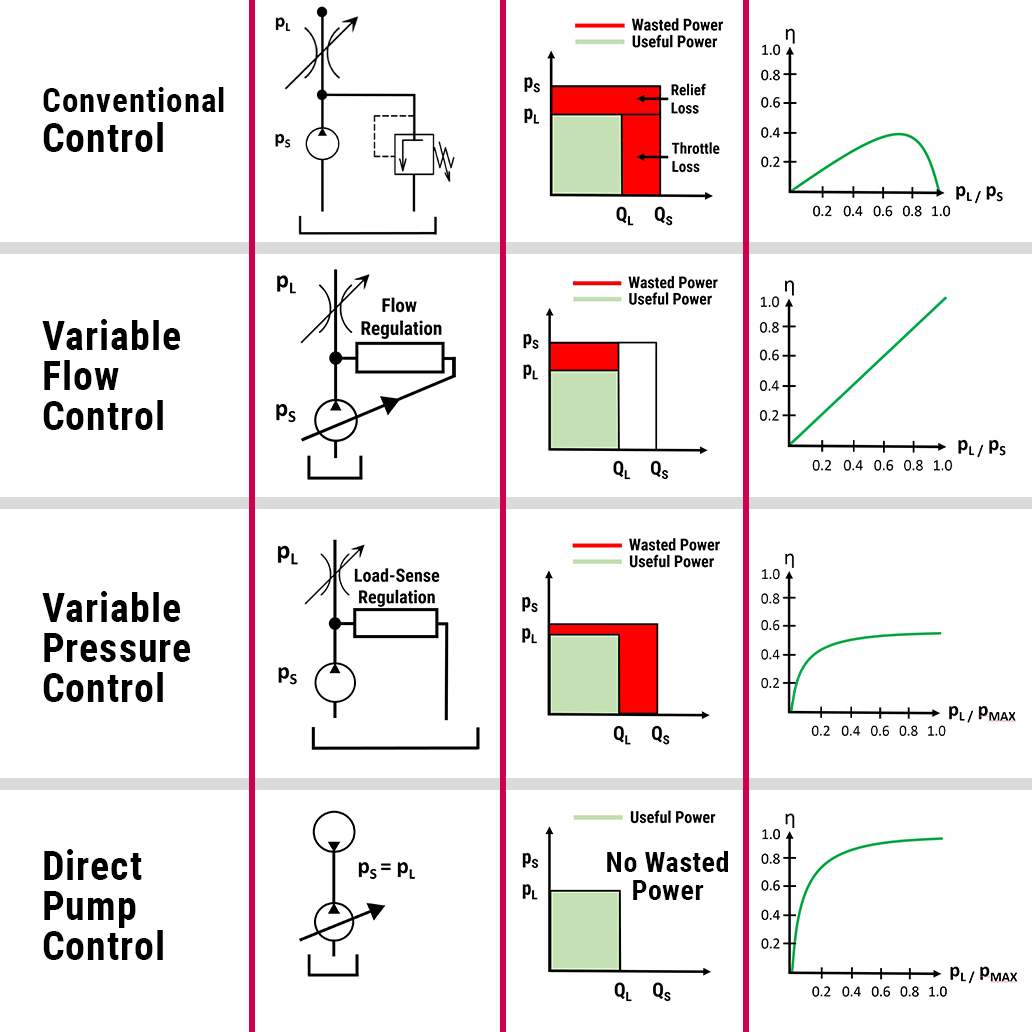
Inefficient power distribution additionally stems from the architecture of an ICE-driven system. In most cases, the engine is the lone power source for both traction and work functions. Here, the engine itself could be more efficient (20-30%) and generally matched with the efficient operating point of the hydraulic pump. Efficiency can improve with a secondary power source dedicated to the hydraulic system and likewise further improved by using an electric motor (85-95% efficient) rather than an engine. In any of these cases, the aforementioned valve distribution losses would still exist.
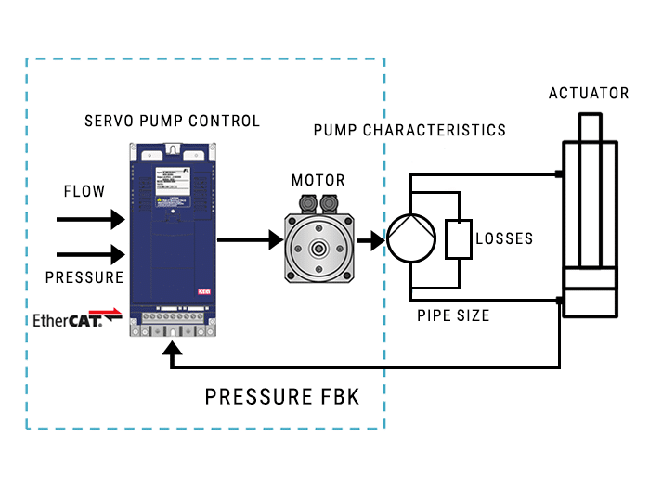
Only direct-drive variable pump control eliminates these valve loss inefficiencies. This is where hydraulic decentralization and electrification provide further opportunities for efficiency improvements as well as other potential benefits.
A New Approach: Decentralized Work Functions
Now, consider how work functions can be improved with electrification. With electrification, the large combustion engine is replaced with a battery and electric motors. Electric motors are more modular than ICEs, so the system isn’t limited to one large power source. This is because electrification allows multiple electric motors to be introduced at a lower marginal cost.
In this system, the work functions are decentralized because they no longer rely on a central power source. This allows for a level of modularity that the traditional combustion engine can’t provide. For example, in an electrified system, one large electric motor can be assigned as the traction drive, while small, independent motors can be dedicated to each individual work function.
Two major types of decentralized architectures exist: Hydraulic decentralization and electro-mechanical decentralization. The following sections will provide descriptions of both types.
Hydraulic Decentralization
Hydraulic decentralization represents a specific form of decentralization. The hydraulics are retained in this approach, but each work function is segregated into its individual hydraulic circuit, powered by an independent electric motor. This setup enables autonomous control of flow and pressure for each function.
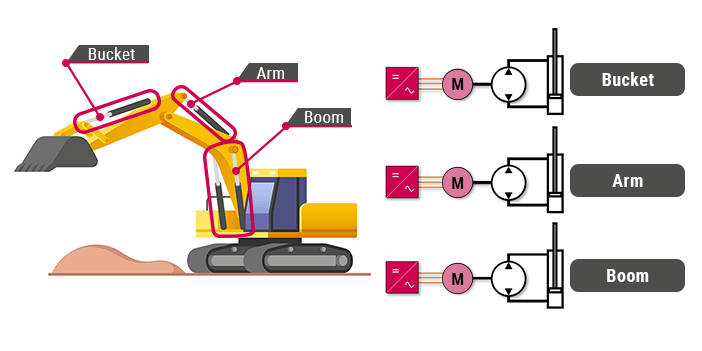
Hydraulic decentralization offers the advantage of powering each function directly and on-demand through independent hydraulic circuits. Each motor-pump can be appropriately sized for its specific function, generating power according to demand. This results in significant efficiency gains by minimizing power distribution losses while preserving the power density inherent in hydraulic systems.
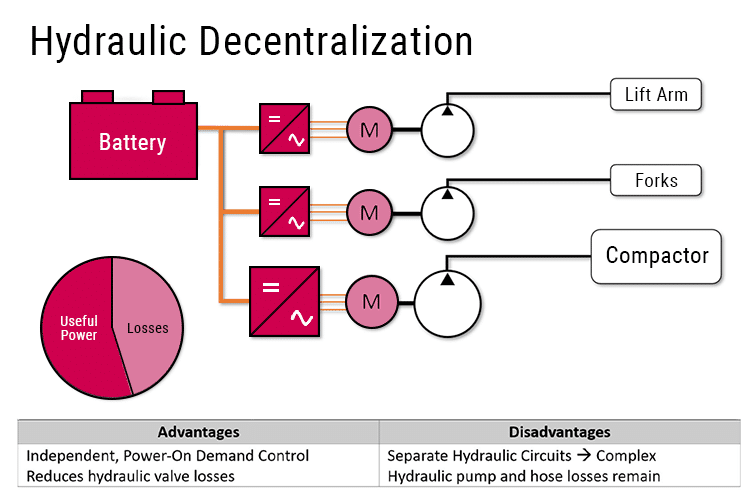
However, hydraulic decentralization comes with drawbacks. The division of the power source into multiple pump motors means that each work function now requires a separate and self-contained hydraulic circuit, increasing the number of components and complexity in system design. Furthermore, the retention of hydraulics introduces the potential for oil leaks in the hydraulic system.
Electro-Mechanical Decentralization
The other type of decentralization is electro-mechanical decentralization, where electric motors mechanically drive the work function. Commonly called “hydraulic replacement,” this approach substitutes hydraulics with a more efficient electro-mechanical power transmission system.
For rotary work functions like brushes and augers, electro-mechanical solutions are relatively straightforward to implement because electric motors inherently generate rotary motion. Here, the motor is generally geared up or down to match the torque and speed required, but high-torque, direct-drive motors can also be used.
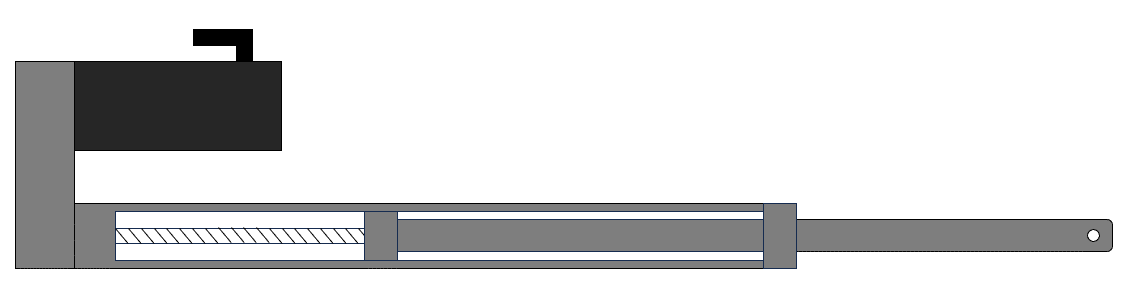
Electro-mechanical linear actuators are typically used for linear motion. These actuators come in different versions and configurations, but screw-type actuators are among the most common for mobile applications. Here, an electric motor drives a screw, causing a cylinder to extend or retract. This allows the electro-mechanical actuator to fill the role of a hydraulic cylinder without needing hydraulics.
Electro-mechanical solutions offer notable advantages, including exceptionally high efficiency, enhanced performance, and reduced maintenance requirements. The elimination of valve, pump, and hose losses contributes to increased system efficiency. Additionally, on-demand control of each work function independently enhances operational efficiency. Performance sees an improvement through the direct connection of the motor to the work function, enabling precise control over speed, torque, and positioning. This results in a higher dynamic response, such as increased throughput, and allows for more accurate control. Lastly, maintenance is minimized by eliminating hydraulic circuit components like hoses, filters, and fluids.
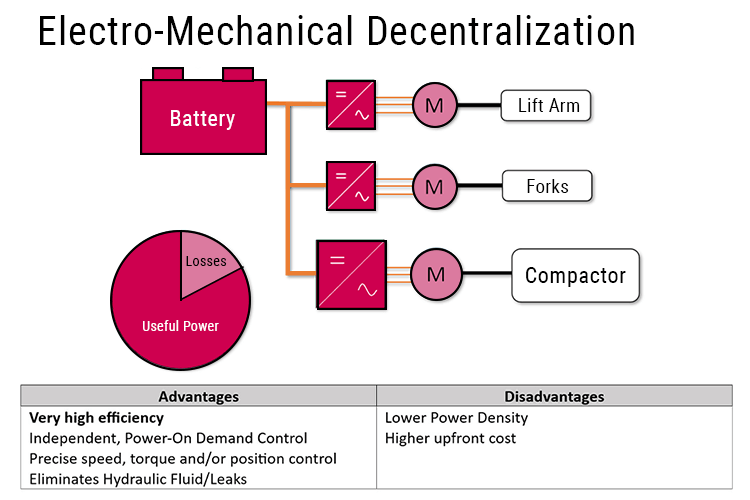
The tradeoff when using electro-mechanical devices is lower power density and shock tolerance compared with hydraulic components. Additionally, electrically-driven work functions typically have a higher upfront cost.
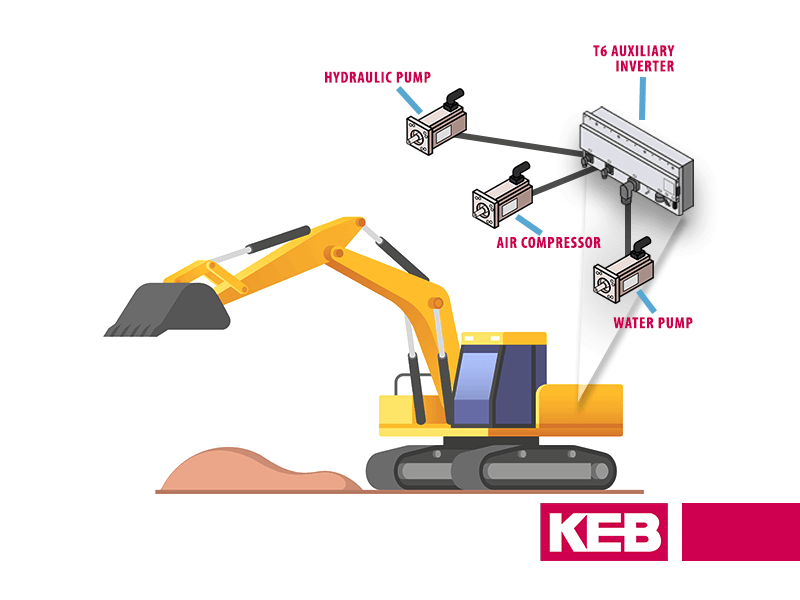
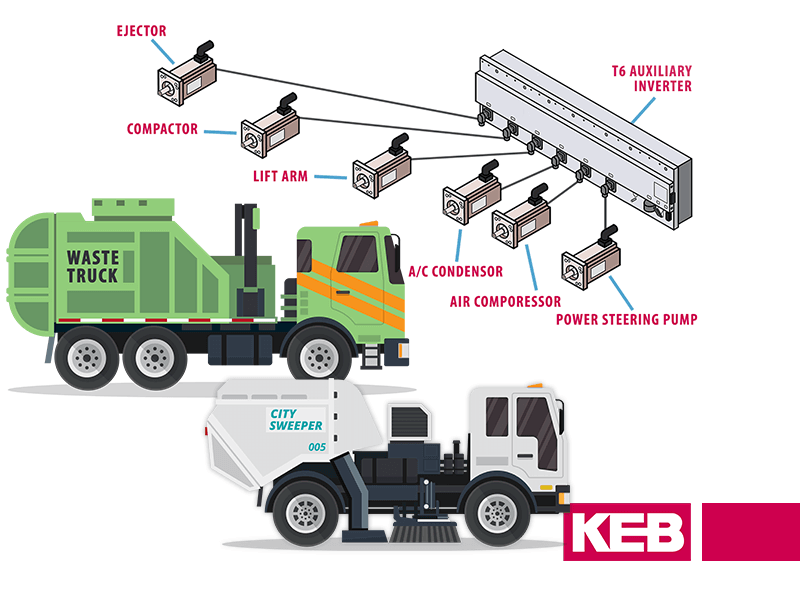
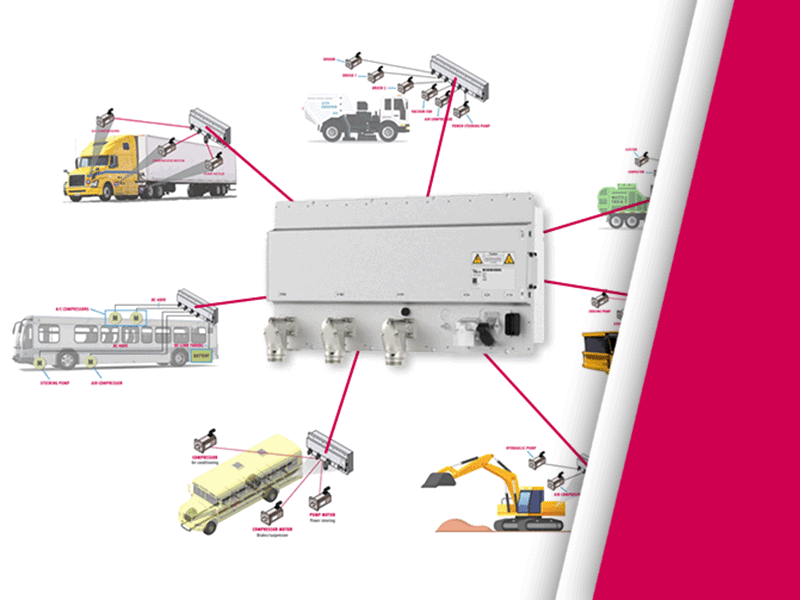
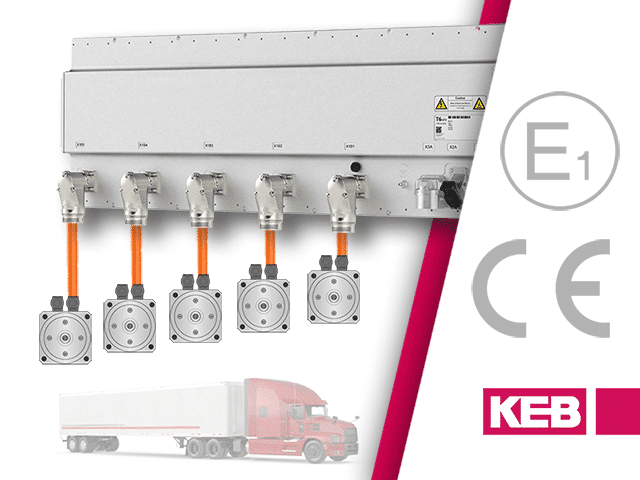
In some cases, individually electrifying each work function may not be feasible. However, one solution to consider is an inverter platform that can support independent control of multiple motors. Platforms such as the KEB T6 Auxiliary Inverter consolidate multiple inverters into one system to reduce redundant HVDC cabling, coolant requirements, and communication connections. Here, a system can be scaled to independently control up to six motors.
Commercial Vehicles Electrification Solutions
In the realm of electrified equipment, the decentralization of work functions stands to redefine how system design takes place. Through inventive strategies—be it hydraulic or electro-mechanical—a new standard for modularity and efficiency is emerging. To learn more about how KEB’s electrification solutions can help decentralize work functions, please contact a KEB applications engineer to learn more.
Related Articles
Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.