
VFD Quick Stop Function Using an S6 Servo Drive


The VFD quick stop function is a method used to rapidly stop the motor from normal operation generally due to either an abnormal condition or system failure. This function is not to be confused with an emergency stop, or STO (Safe Torque Off). Rather, quick stop can be employed to bring the motor to a stopped position faster than normally expected with a nominal shutdown procedure.
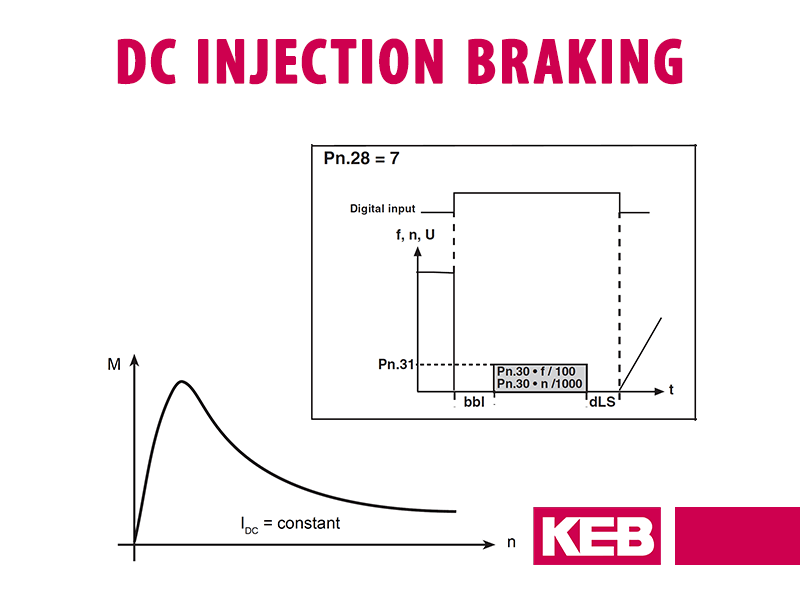
Is it Similar to DC Injection Braking?
In a previous article, we’ve talked about a stopping method called DC Injection Braking, which is the process of injecting direct current into the stator windings of a motor. You can watch the DC Injection Braking video here if you’re interested. The quick stop function, in contrast, is more of a rapid deceleration instead of an instant injection of DC power to the motor. This allows the length and intensity of the braking to be controlled more precisely using software parameters.
Quick Stop Function Applications
When a component fails or an operation misbehaves you don’t want your machine to keep running normally. In these instances, a quick stop function can bring the motor to a controlled, pre-programmed deceleration to zero speed. If your normal operation uses long, extended deceleration times and you desire to bring the motor to a stop more rapidly, the quick stop function may be helpful.
Applying Quick Stop in COMBIVIS 6
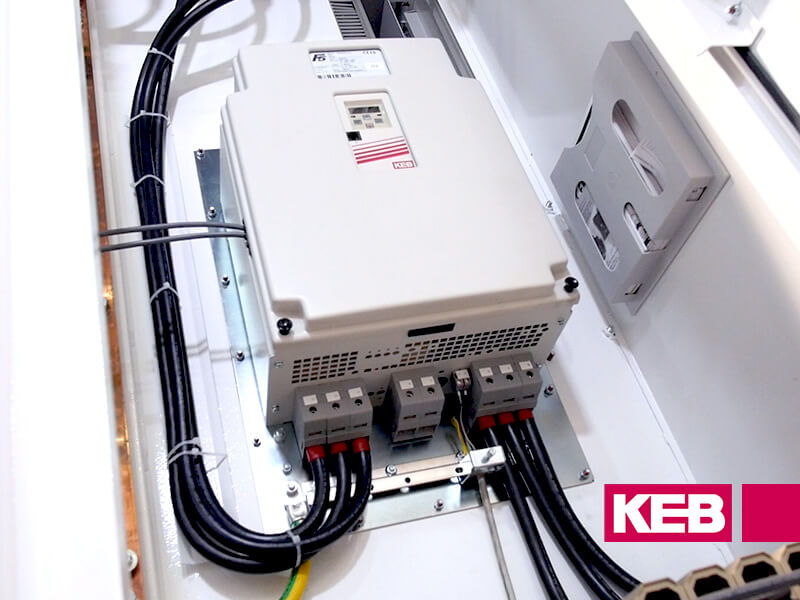
In order to apply a quick stop function to a KEB VFD like the S6 Servo Drive you will want to connect the drive to a computer that has KEB’s COMBIVIS 6 software installed in order to activate and modify this function.
To configure and enable the quick stop function, there are a few parameters that first need to be adjusted.
Enable quickstop
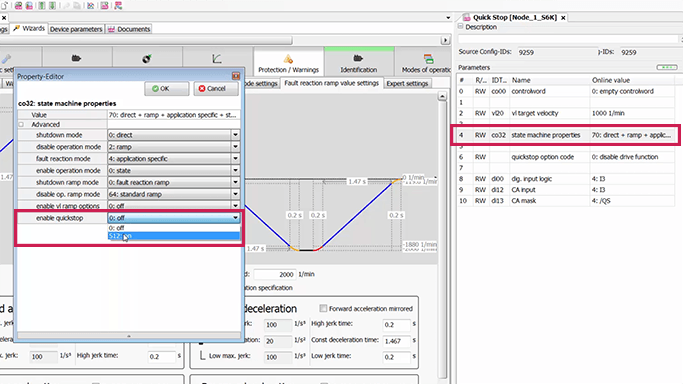
You will need to locate parameter co.32 “state machine properties”. Click on that parameter and in the pop-up window navigate to “enable quickstop” and select “on” to enable this function.
Configure quickstop option code and adjust parameters
Then we can adjust the quick stop stopping method through the “quickstop option code”. There are essentially 2 stopping methods that can be employed to configure the deceleration ramp for the quick stop function.
Find the Fault Reaction Ramp Value Settings
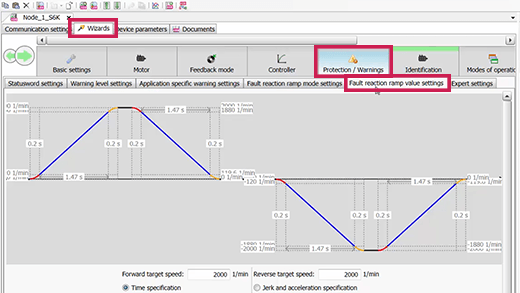
Then, move into the Wizards tab, find the Protection/Warnings tab and under that click on the “Fault reaction ramp value settings” tab.
Adjusting the deceleration ramp
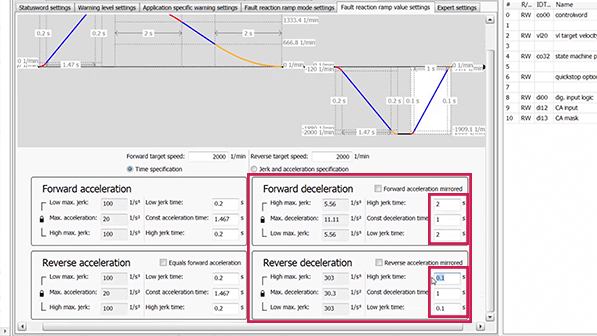
Depending on the “quickstop option code”, we can program the quick stop deceleration ramp to follow that of the fault reaction ramp. Depending on the application, we can set the fault reaction ramp to be as aggressive or soft as needed for the system. Once you have the forward and reverse deceleration ramps set, you are ready to test to make sure you’re getting the desired outcome.
VFD Quick Stop in Practice
After enabling the quick stop functionality, you can activate this function in a number of different ways since it is ultimately controlled by the controlword.
When using “Quick Stop”, the S6 has two methods of bringing the motor to a stop. They can be referred to as “Coast to stop” and “Ramp to stop”.
Coast to stop
First, the drive can immediately disable operation and output and allow the motor to coast to a stop. This would be beneficial for horizontal-axis applications, mixers, or rotary wheels where there is low inertia yet friction can help stop the motor.
Controlled deceleration
The other method for “Quick Stop” operation is a controlled deceleration of the S6 drive using the fault reaction ramps. When an error is present in the S6 drive, the drive will decelerate and stop according to the fault reaction ramp settings outlined in the protection parameters. The “Quick Stop” function can also be configured to follow that fault reaction ramp.
Depending on the system, the fault reaction ramp can be set to be as aggressive or soft as needed for the application. This method of “Quick Stop” can also provide some holding torque (if using encoder feedback) once 0-speed is reached. This may be useful for vertical-axis applications or applications desiring some holding torque before a motor brake may be engaged. Depending on the inertia and available friction in the system, a driven and controlled fast deceleration may be desired.
Related Articles
Let's Work Together
Connect with us today to learn more about our industrial automation solutions—and how to commission them for your application.